|
|
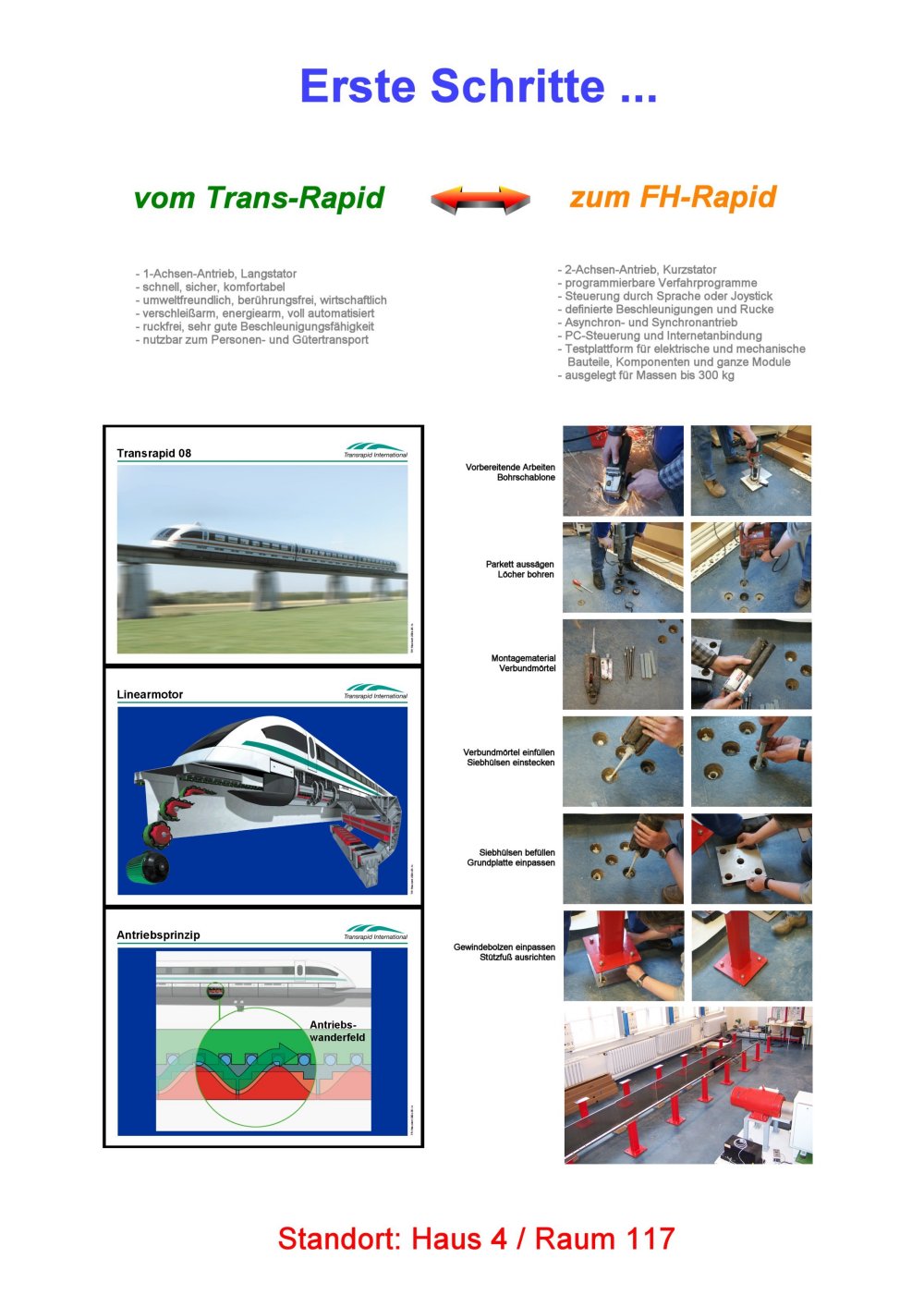
Hochdynamischer 2-Achsen-Antrieb Platzhalter Platzhalter Motivation Antriebstechnik
erfahren – Was leisten elektrische Antriebe?
Es soll ein hochdynamischer 2-Achsen-Antrieb projektiert, konstruiert und realisiert werden. Dieser Antrieb soll in der Lage sein, eine Person in eine gewünschte x-y-Position zu bewegen. Bei einer angenommenen bewegten Masse von 400 kg beträgt die maximale Verfahrgeschwindigkeit ca. 3 m/s. Bei einer x-Länge von 6 m ist der Antrieb somit in der Lage, die Person innerhalb von 2 s über 6 m zu transportieren. Die dabei auftretende maximale Nenn-Beschleunigung beträgt 3,4 m/s². Der Verfahrweg in y-Richtung soll 2 m betragen.
Das Verfahren der Person
in x-Richtung wird durch einen Linearantrieb realisiert. Ausgesucht
wurde dafür ein Synchronmotor der Firma Siemens mit einer Nennkraft
von 675 N und einer Nennverfahrgeschwindigkeit von 277 m/min. Dieser
Motor liefert eine Spitzenkraft von 1650 N bei einer maximalen elektrischen
Leistung von 9,16 kW. Funktion (Leuchtfeld) Um ein sinnvolles Verfahren
zu gewährleisten, soll der 2-Achsen-Antrieb mit einem Reaktionsspiel
kombiniert werden. Funktion (Wegverfolgung) Um ein sinnvolles Verfahren
zu gewährleisten, soll der 2-Achsen-Antrieb mit einem Reaktionsspiel
kombiniert werden. Nutzungsmöglichkeiten 1. In der
Phase der Entwicklung, des Aufbaus und der Inbetriebnahme 2. In der Betriebsphase a) praktische Übungen
für Studenten des Maschinenbaus und der Elektrotechnik bezüglich
der Projektierung und Konstruktion von einzelnen Komponenten bis hin
zum Gesamtprojekt und Erprobung am realen Objekt Modifikationen Stand: 20.02.2004 1. Es wurde sich für
das System mit Wegverfolgung entschieden. 2. Die Standortfrage wurde aus finanziellen Gründen modifiziert. Da eine notwendige Umgestaltung des ursprünglichen Aufbauortes (Raum 009/Haus 4) bzw. des Alternativraumes 010/Haus 4 nicht möglich ist, wurde sich für den Raum 117/Haus 4 als endgültiger Aufbauort für den 2-Achsen-Linearantrieb entschieden. Dieser Raum bietet nach einer (mit minimalen finanziellen und personellen Aufwand) entsprechenden räumlichen Umgestaltung alle Voraussetzungen für einen ordnungsgemäßen örtlichen und elektrischen Aufbau des Linearantriebs. 3. Für die 7 m lange X-Achse wurde als Primärteil ein Asynchronlinearmotor Typ DLM 6719/b Doppelstator der Firma EAAT GmbH Chemnitz ausgewählt. Dieser Motor liefert eine Dauerschubkraft von 900 N und eine Spitzenschubkraft bei v = 0 m/s von 2700 N. Bestromt wird dieser Motor von einem Frequenzumrichter Typ UD 7045 mit RS232 der Firma Berges GmbH. Als Sekundärteil dient eine segmentierte Aluminiumschiene mit den Abmaßen 6500 x 500 x 6 mm (L x H x B). Als lineares Längenmeßsystem kommt das magnetische Meßsystem SIKO, Typ LE100 zum Einsatz. Für die 2 m lange Y-Achse soll ein Synchronlinearmotor der Firma EAAT GmbH angeschafft werden. 4. Der mechanische Unterbau, die Fahrkabine und die Auswahl des elektromechanischen Bremssystems ist beim FB Maschinenbau in Arbeit. Dazu sind bereits 2 Projektarbeiten durchgeführt und durch Prof. Volkmar Schwanitz betreut und bewertet worden. Um diese Arbeit zu forcieren und auf ein höheres Qualitätsniveau zu heben, soll dieser Bereich durch eine oder mehrere Diplomarbeiten weiter bearbeitet werden. 5. Ebenfalls im Rahmen einer Diplomarbeit (Abgabetermin: Februar/2004) wurden die ersten notwendigen grundlegenden Betrachtungen zu den vorgesehenen Verfahrprofilen und den sich daraus ergebenen Kraft- und Momentenanforderungen an die einzelnen Achsen durchgeführt. Es wurde ein Excel-Programm erstellt welches es erlaubt, auf Grund von Nutzervorgaben die für die vorgesehenen Verfahraufgaben notwendigen Motoren und Stromrichter aus einer Datenbank auszuwählen. Desweiteren wurde für eine konkrete Anlage der elektrische Stromlauf- und Anschlussplan mit allen notwendigen elektrischen Komponenten projektiert. Auf dieser ersten Diplomarbeit werden alle weiter folgenden Arbeiten aufbauen. Konkrete Inhalte für Diplomarbeiten •Auswahl aller tragenden
und nichttragenden, führenden und nichtführenden, aktiven
und inaktiven mechanischen Komponenten wie Rahmen, Abdeckungen, Lagerungen,
Führungsschienen, Führungswagen, Spindeleinheiten, Bremssysteme,
Fahrkabine usw. auf der Grundlage einer spezifischen Studienarbeit durch
Studenten des FB Maschinenbau
Dipl.-Ing. Mathias Last
Im
Folgenden einige Einzelheiten zum mechanischen Aufbau der
|
| Vorbereitende
Arbeiten zum mechanischen Aufbau |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Markieren
der Bohrlöcher für die Montage der Tragstützen |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Bohren
der Löcher |
| Platzhalter0 |
 |
|
Platzhalter |
Platzhalter |
| Ausbohren
der Montagelöcher aus dem Parkett |
| Platzhalter0
|
 |
| Platzhalter |
Platzhalter |
| Bohren
der Löcher für die Schwerlastanker in den Beton |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
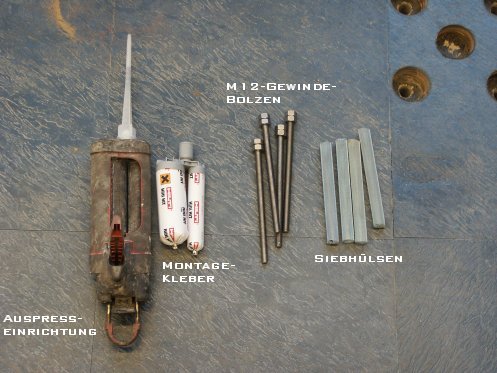
| Notwendiges
Montagematerial |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Der
Montagekleber |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Einbringen
des Klebers in die Bohrlöcher |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Einpressen
der Siebhülsen |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Einsetzen
der Ausgleichsplatten |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Einführen
und Ausrichten der Montagebolzen in die Klebebohrungen |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Die
montierte Tragstütze |
| Platzhalter |
 |
| Platzhalter |
Weitere Bauteile...
|
| Teile
des 40kW-Asynchron-Linearmotors |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Aufgebautes
Funktionsprinzip |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
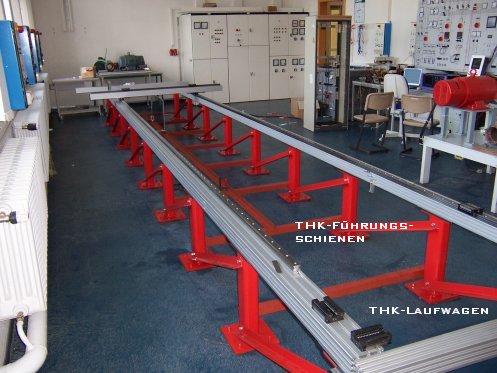
| Montierte
Alu-Schwerlastprofile |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Montierte
Linearführungsschienen |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Ein
Teil der y-Achse |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
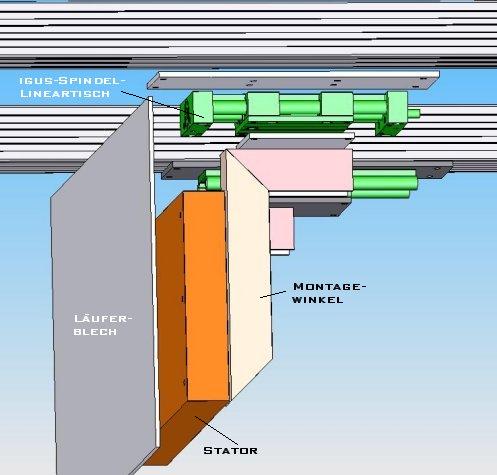
| Detailansicht
1 des aufgehängten Kurzstators |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Detailansicht
2 des aufgehängten Kurzstators |
| Platzhalter |
 |
| Platzhalter |
Platzhalter |
| Detailansicht
3 des aufgehängten Kurzstators |
| Platzhalter |
 |
| Platzhalter |
