| |
|
| Einleitung |
Bevor wir
zum Funktionsprinzip eines Gleichstrommotors gelangen, macht es
Sinn, ein paar Worte über die physikalischen Grundlagen des (Elektro-)Magnetismus
zu betrachten. Ohne Magnetismus, kein Elektromotor, keine Transformatoren,
keine Generatoren; sprich nichts waere so wie es heute ist mit grosser
Wahrscheinlichkeit. Im 19. Jahrhundert wurden zuerst Batterien als
Energielieferanten verwendet und die ersten Gleichstrommaschinen
gelangten zum Einsatz. Erst im 20.Jahrhundert verdraengten Wechselstrommaschinen
(Motoren sowie Generatoren) die Gleichstrommaschinen. Eines blieb
jedoch gleich - die Verwendung der physikalischen Effekte von Magnetfeldern.
Interessanterweise hat bis heute noch niemand ein Magnetfeld gesehen,
wir koennen bloss deren Wirkung sichtbar machen. Die Physik hat
schon sehr frueh mathematische Modelle hervorgebracht, mit welchen
sich die Auswirkungen recht gut berechnen lassen. |
Inhalte dieses Unterkapitels Sie
finden in diesem Unterkapitel folgende, unten aufgeführte Abschnitte,
die Sie direkt mittels Link erreichen koennen. Nach jedem Abschnitt
folgt ein Pfeilsymbol (MENU), welches Sie wieder zu diesem Inhaltsverzeichnis
bringt. |
| |
|
1.) Grundlagen zu Magnetismus & Elektrizität
|
Magnetfelder
haben die Eigenschaft, Kräfte auf bewegte Ladungsträger in
einem Leiter (also auch in Gasen) auszuüben. Ladungsträger bewegen
sich jedoch nur, wenn man Sie dazu "antreibt", also Energie zuführt.
Fliesst Strom durch einen Leiter,
so bewegen sich dessen Ladungsträger. Befindet sich dieser Leiter
in einem (möglichst homogenen) Magnetfeld, so wirkt die sogenannte
Lorenzkraft auf jeden der einzelnen Ladungsträger. Stellen wir
uns die Ladungsträger als kleine Kugeln vor, die sich, aufgereiht
wie auf einer Perlenkette, innerhalb des Leiters bewegen und auf
jede Kugel besagte (Lorenz-)Kraft wirkt, addieren sich diese "Einzelkräfte"
zu einer "Gesamtkraft", welche auf diesen Leiterabschnitt wirkt.
Umgekehrt erzeugt ein stromdurchflossener Leiter (also die Bewegung
der Ladungstraeger), das sich um diesen Leiter ein kreisförmiges
Magnetfeld aufbaut. (Wir merken uns diese Aussage fuer spaeter!)
Die Lorenzkraft wirkt orthogonal zur (sog.
technischen) Stromrichtung und der Richtung des Magnetfeldes (sog.
Wirkrichtung der Feldstärke). Eine einfache Methode zur Bestimmung
der Richtung der Lorenzkraft ist die sogenannte "Rechte-Hand-Regel"
wie in der folgenden Grafik dargestellt. |
|
Bild1: (Quelle: Universität
Ulm) |
|
|
Die
Idee der 'Rechten-Hand-Regel' ist, eine der Richtungen
dieser Grössen zu bestimmen. Also typischerweise
ist die Richtung des Stromflusses (Ladungsträger
die sich mit der Geschwindigkeit [v] bewegen), sowie
die Richtung des Magnetfeldes [H] bekannt. Der Zeigefinger
zeigt dann in der in Bild 1 dargestellten Handstellung
in die Richtung der (Lorenz-)Kraft [F]. Dies ist
eine gute "Eselsbrücke", dass wir uns spaeter wieder
an die drei Einflussgrössen erinnern lässt. In Worten
ausgedrückt: |
|
|
|
Auf
Ladungsträger, die sich mit der Geschwindigkeit
[v] in einem Magnetfeld [H] bewegen, wirkt eine
Kraft [F]. |
|
|
|
Bild 2: (Quelle: Author)
|
|
|
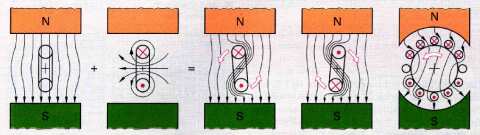
Ein
stromdurchflossener Leiter erzeugt ein kreisförmiges
Magnetfeld um sich selbst. Bringen wir diesen stromdurchflossenen
Leiter in ein weiteres Magnetfeld ein (Bsp. zwischen
ein Hufeisenmagnet), so kommt es zu einer Überlagerung
der beiden Magnetfelder wie im Bild 2 zu sehen ist.
Weisen beide Felder in dieselbe Richtung (rechte
Bildhälfte), kommt es zu einer Addierung
der beiden Kräfte. Weisen beide Felder in entgegengestzte
Richtungen, so subtrahieren Sie sich entsprechend
(Linke Bildhälfte). |
|
|
| Dies hat zur Folge,
dass sich der stromdurchflossene Leiter in die Richtung bewegen
wird, in welche die grösseren Kräfte wirken, in unserem Beispiel
also nach links - im Volksmund spricht man von 'abstossen'.
Wir stellen fest, dass diese Ablenkungskraft
- die Lorenzkraft - verantwortlich dafür ist, dass sich ein stromdurchflossener
Leiter in einem Magnetfeld bewegt und Grundlage für die Funktion
eines Gleichstrommotores ist. (Gilt im übrigen auch für Wechselstrommotoren.)
Der nachfolgende Abschnitt behandelt den Aufbau von Gleichstrommotoren.
|
¨
| |
|
2.) Aufbau eines Gleichstrommotors
|
Der
Gleichstrommotor ist eine sogenannte Aussenpolmaschine, d.h. im
Magnetfeld der Permanentmagneten ist eine sich drehende Leiterschleife
gelagert. Vereinfacht man diesen Aufbau auf das Wesentliche, so
besteht der Gleichstrommotor aus zwei grundlegenden Bauteilen: Erstens
aus einem Hauptmagneten (Permanentmagneten), der am Ständer (Stator)
befestigt ist. (Anstelle von Permanentmagneten kann ein Magnetfeld
auch elektrisch erzeugt werden. Dabei sind dann am Stator sogenannte
Erregerwicklungen (Spulen) angebracht.) Zweitens aus der
Leiterschleife, dem sogenannten Anker (auch Rotor genannt),
an dessen Ankerkern (meist aus geschichteten Blechen bestehend)
die Ankerwicklungen aufgebracht sind. Im Modellbausektor
treffen wir praktrisch ausschliesslich auf Gleichstrommotoren mit
Permanentmagneten. Ob mit Permanentmagneten, oder mit Erregerspulen
ausgestattet; beide Konstruktionen bezeichnet man als fremderregte
Gleichstrommotoren. Der Gleichstrommotor
der untenstehenden Animation ist ein sogenannter zweipoliger
Gleichstrommotor mit der Polpaarzahl p = 1. (Nord-
und Südpol sind die sog. 'Feldkomponenten' eines Magneten = 1
Pol-Paar).
Der abgebildete Anker ist ein sogenannter Doppel-T-Anker. Dies
ist die einfachste Bauform, welche für einen Anker einer Gleichstrommaschine
möglich ist. Den Namen hat er von seiner Form erhalten, die an
zwei zusammengesetzte "T`s " erinnert.
|
 |
| Bild 3: (Quelle: Gymnasium Donauwörth)
|
Die Anfänge und Enden der Ankerspulen
sind an die Lamellen des Kommutators (auch Stromwender, oder Kollektor
genannt) angeschlossen (in Animation blau und orange dargestellt).
Der Kommutator muss also pro Wicklung, die sich am Anker befindet,
je zwei Lamellen (Kupfersegmente) aufweisen. Die Lamellen sind durch
Zwischenlagen (Bsp. 'Mikanit') voneinander isoliert und bilden in
ihrer Gesamtheit den zylinderförmigen Kommutatorbelag. Die Stromzufuhr
in der Ankerwicklung erfolgt typischerweise über Kohlebürsten (in
der Animation durch kleine rote Rechtecke gekennzeichnet), die mit
dem rotierenden Stromwender einen Gleitkontakt geben und so die
Spulen mit Strom versorgen. Kohle ist ein relativ guter elektrischer
Leiter, welcher zudem schmierende Eigenschaften aufweist, indem
kleine Kohlepartikel von der Kohlebürste abgeschliffen werden und
sich auf der Kollektoroberfläche als Gleitmittel ansammeln.
Kommutator und Bürsten kann man auch als einen mechanischen (Um-)Schalter
verstehen, der beim Durchgang des Kollektors durch den Totpunkt
(Nulldurchgang) die Stromrichtung umkehrt. Der
Ständer (in der Animation nicht gezeigt!) stellt den gesamten
äusseren Teil des Motors dar. Der Ständer ist gleichzeitig auch
der sogenannte 'Jochring', der den magnetischen Rückschluss der
Hauptpole garantiert. Die "austretenden" magnetischen Feldlinien
"treten" dort wieder "ein" - Magnetische Feldlinien bilden immer
einen geschlossenen Kreislauf. Die Feldlinien, welche in typischen
Darstellungen stets vom Nordpol zum Südpol zeigen, haben in Wirklichkeit
keinen Anfang und kein Ende, man kann sich vielmehr vorstellen,
dass sie nach Erreichen des Nordpols wieder zum Südpol zurückkehren;
allerdings beschreiben sie dabei nicht denselben Weg. Den "Rückweg"
nehmen sie nämlich über den Ständer des Motors, um zum "Ausgangspunkt"
(= Nordpol) zu gelangen. |
| Beim
nebenstehenden Photo eines aufgeschnittenen Industrie-Gleichstrommotors
lassen sich die einzelnen Ankerteile (Dunkelgrau)
mit den jeweiligen Wicklungen dazwischen erkennen.
Die Stromzufürung zu den Wicklungen geschieht ueber
Schleifkontakte (verdeckt in weissen Kunststoff-halterungen,
rechts) |
|
|
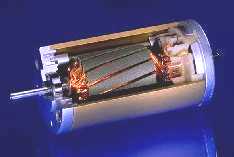
Bild 4: (Quelle: http://www.elektromotoren.de)
|
|
|
| |
|
3.) Funktionsweise eines Gleichstrommotors
|
| In
Abschnitt 1 haben wir die physikalischen Grundlagen verstehen gelernt
und in Abschnitt 2 den generellen Aufbau von Gleichstrommotoren
behandelt. Zur Wiederholung: Ein
Gleichstrommotor setzt sich im Prinzip aus einem feststehenden
Stator, an dem die Permanentmagnete angebracht sind und einem
rotierenden Anker, zusammen. In der untenstehenden Grafik sind
die Pole des Feldmagneten durch N = Nordpol und S = Südpol gekennzeichnet.
Der Anker, der sich im Luftspalt des Feldmagneten dreht, wird
in der Abbildung mittels eines Balkens und zweier Kreise dargestellt,
die in a) die beiden Spulenhälften der Ankerwicklung und in b),
c) und d) die jeweilige Stromrichtung symbolisieren sollen.
Das bereits in Abschnitt 1) erwähnte, 'elektrodynamische Gesetz'
besagt, dass auf eine stromdurchflossene Leiterschleife im Magnetfeld
die sich Kraft [F] abhängig vom Strom [I] und der magnetischen
Feldstärke [B] ist. Ausserdem konnten wir in Bild 2 erkennen,
dass ein stromdurchflossener Leiter von einem kreisförmigen Magnetfeld
umgeben ist. Kombinieren wir nun das Magnetfeld des Feldmagneten
mit dem Magnetfeld der Leiterschleife, so können wir eine Überlagerung
der beiden Felder sowie eine daraus resultierende Kraftwirkung
feststellen. |
| |
 |
| Bild 5: (Quelle:
Gymnasium Donauwörth) |
| In
Bild 5a) erkennen wir, dass der Anker parallel zu den Feldlinien
ausgerichtet ist. Die Ankerwicklung setzt sich aus zwei Spulenhälften
zusammen, die als Kreise am jeweiligen oberen und unteren Ende des
Ankers dargestellt sind. Legen wir nun eine Gleichspannung an die
beiden Enden der Ankerwicklung (Bild 5b), können wir uns vorstellen,
dass die bewegten Ladungsträger (lies: "Stromfluss") in die untere
Spulenhälfte hineinfliessen (Kreis mit Punkt) und aus der oberen
Spulenhälfte wieder herausfliessen (Kreis mit Kreuz). Wir
erinnern uns daran, dass jede stromdurchflossene Spule ein eigenes
Magnetfeld entwickelt und es dabei zu einer Überlagerung des Magnetfeldes
des Permanatmagneten (sog. 'Erregerfeld') mit dem Magnetfeld der
unteren Spulenhälfte und dem Feld der oberen Spulenhälfte kommt.
Die Feldlinien des Permanentmagnetfeldes sind immer gleich gerichtet,
sie zeigen stets vom Nord- zum Südpol. Die Felder der beiden Spulenhälften
hingegen, in Bild 5b) durch Kreise mit je einem Pfeil dargestellt,
haben entgegengesetzte Richtungen. Betrachten wir in Bild 5c)
die untere Spulenhälfte, so sehen wir, dass auf der linken Seite
des Feldes der Spulenhälfte die Feldlinien von Erregerfeld und
Spulenfeld die gleiche Richtung aufweisen. Es ist dargestellt,
wie es auf dieser Seite zu einer Verdichtung (=Überlagerung) der
Feldlinien kommt (Wir erinnern uns an Abschnitt 1), sodass es
zu einer Kraftwirkung in Richtung des verminderten Feldbereichs
(in Bild 5c), d), e) durch weisse Pfeile dargestellt)kommt. Bild
5d) zeigt denselben Effekt bei umgekehrter Stromrichtung (= Umkehrung
der Drehrichtung)
Aufgrund dieser Kraftwirkung in die jeweils
entgegengesetzte Richtung am unteren und am oberen Ende des Ankers
entsteht ein Drehmoment, welches wiederum eine Rotationsbewegung
des Ankers verursacht.
Bild 5e) stellt die Kraftwirkung auf einen
sog. Trommelanker dar. (Trommelanker werden oft bei handelsüblichen
Gleichstrommotoren eingesetzt.) Wir erkennen, dass dieser Anker
nicht nur eine Leiterschleife bzw. Ankerwicklung aufweist, sondern
gleich mehrere. Demzufolge vergrössert sich auch die Kraftwirkung
auf den Anker sowie das von ihm abgegebene Drehmoment.
Zusammenfassend stellen wir fest: |
|
Bei
Gleichstrommotoren wird das Drehmoment also durch
das Zusammenwirken von Ständermagnetfeld und Ankermagnetfeld
gebildet. Die Stärke des durch die Ankerwicklung
fliessenden Stromes [I] ergibt die Stärke der um
jede Ankerwicklung erzeugten Magnetfelder [H] der
Ankerspule. Die Gesamtheit dieser Magnetfelder erzeugt
das besagte Anker(magnet)feld. Dieses bewirkt eine
Kraft [F] auf die Ankerleiter und ein Drehmoment
[M] stellt sich ein. |
|
|
| |
|
4.) Ankerkonstruktionen |
| Elektromomtoren mit einem, wie im Bild 3 geizeigten, Doppel-T-Anker
haben einen gravierenden Nachteil: Sie sind nicht seblstanlaufend.
Genau dann, wenn sich die Kommutatorbürsten im sog. Totpunkt befinden
(= kein Stromfluss möglich). Gleichstrommotoren mit 'Dreifach-T-Anker'
(siehe Bild unten) können aus jeder beliebigen Position anlaufen,
da die Magnetpole des Ankers so entstehen, dass sich die Kräfte
auf die Ankermagnetfelder nicht selbst aufheben können und der Anker
immer derart zum Stillstand kommt, dass ein Kontakt der Kommutatorbürsten
mit dem Kollektor stattfindet. Wie schon der Name vermuten lässt,
besteht der Dreifach-T-Anker aus drei T-förmigen Teilen, um die
jeweils eine Spule gewickelt ist. Der Kollektor ist mit drei Segmenten
(Lamellen) belegt. An jede Lamelle sind dabei je ein Spulenanfang
bzw. ein Spulenende zweier benachbarter Wicklungen angebracht.
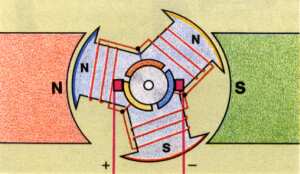
Bild 6: (Quelle: Gymnasium Donauwörth)
Grundsätzlich ist zur Auslegung der Ankerkonstruktion
(Polpaarzahl) folgendes zu bemerken: Die Kraftwirkung auf den
Anker ist Abhängig von der Stellung der jeweiligen Ankerspulen,
da die Richtung des Ankerfeldes sich ja mit der Drehbewegung zum
fixen Hauptfeld ändert; also die Kräfte ständig zu- und wieder
abnehmen bei jeder "Dritteldrehung" (beim dreiteiligen Anker).
Haben Sie einen Billigmotor der "Marke Fernost" in Ihrem Modell,
macht sich dies vor allem bei geringen Motordrehzahlen bemerkbar
als mehr oder weniger starkes Ruckeln. Verwenden Sie jedoch einen
höherwertigen Motor mit einer "feineren Unterteilung", also mit
höherer Polpaarzahl, so werden Sie auch bei niedrigen Drehzahlen
Freude an konstanter, ruckelfreier Drehmomentabgabe haben. |
| |
|
5.) Bürstenfeuer und dessen Ursache
|
| Da
sich während der Kommutierungszeit der magnetische Fluss innerhalb
der Ankerwicklung ändert, wird in den Wicklungen eine sogenannte
Stromwendespannung induziert. Diese Stromwendespannung setzt sich
aus zwei Anteilen zusammen: Der Ankerfeldspannung und der
Reaktanzspannung. Die Ankerfeldspannung entsteht durch das
Umpolen des Ankerfeldes, die Reaktanzspannung durch das Umpolen
des sog. Streuflusses der kommutierenden Spule. Als Streufluss
werden jene Feldlinien bezeichnet, die nicht den rotierenden Anker
durchsetzen. Die Stromwendespannung verzögert den Stromwendevorgang,
welcher jedoch nicht verzögert werden darf, solange die kommutierende
Spule über die Bürste kurzgeschlossen ist. Ist dies der Fall, so
kann zwischen der Bürste und dem ablaufenden Kommutatorsegment ein
sogenannter Lichtbogen entstehen (also z.B. wie beim Elektro-Schweissen).
Dieser Lichtbogen wird als Bürstenfeuer bezeichnet. Er beschädigt
auf Dauer die Bürsten und die Kollektoroberflächen und führt auch
zu Funkstörungen in unserem Empfänger (und anderen Elektrogeräten).
Um diese schädigende Wirkung der
Stromwendespannung zu unterbinden, werden, üblicherweise bei Industriemotoren
höherer Leistung, auf der Höhe des Nulldurchgangs sogenannten
Wendepole (kleine Wicklungen, am Stator fixiert) angebracht. Derartige
Elektromotoren sind praktisch immer mit Erregerwicklungen ausgestattet
(also ohne Dauermagnete). Besagte Wicklungen der Wendepole werden
vom Ankerstrom (sprich: "Motorstrom") durchflossen und erzeugen
dadurch ein sog. Wendefeld, welches das Ankerfeld in der Wendezone
aufhebt und in den kommutierenden Leitern (also in die
Wicklungen, welche für einen sehr kurzen Moment ohne Stromfluss
sind) eine Gegenspannung induziert. Diese Spannung ist etwa gleich
gross wie die Reaktanzspannung, dieser aber entgegengesetzt,
so dass es zu einer Art "Auslöschung" der beiden entgegengerichteten
Spannungen kommt. |
| |
|
6.) Statische und dynamische Grössen
|
| Elektromotoren
werden auch als elektrisch-mechanische Energiewandler bezeichnet,
da es einen Zusammenhang zwischen den elektrischen Grössen und mechanischen
Grössen gibt. Ohne näher darauf einzugehen, setzt sich die sogenannte
Leistungsbilanz aus zwei Teilen zusammen: Ein Leistungsanteil wird
nur in (sog. 'Joulsche') Wärme umgesetzt, ein weiterer ist für die
Erbringung der mechanischen Leistung verantwortlich. Diese mechanische
Leistung setzt sich ihrerseits wieder aus zwei Komponenten zusammen:
Zum einen aus der Leistung, die benötigt wird um die Lager- und
Lüfterreibung des Motors zu überwinden, zum anderen aus der eigentlichen
Arbeitsleistung für den Betrieb der an den Motor gekoppelten Arbeitsmaschine.
Es ergibt sich für die Leistungsbilanz: P_Verlust_tot
= P_Wärme+ P_Reibung + P_Antrieb
Bei Industriemotoren höherer Leistung ist
die Arbeitsleistung typischerweise viel grösser als die Leistung,
die durch Reibung und Wärme verlorengeht, bei manchen Modellmotoren
jedoch nicht, da diese eine sehr hohe Leistung innerhalb einer
kurzen Zeitspanne abgeben müssen (Bsp. Flachbahnrenner) und über
die Hälfte der zugeführten elektrischen Energie in Form von Wärme
umgesetzt ("verheizt") werden kann. Bei solchen Modellen ist das
Motorgewicht ebenfalls mitentscheidend, da die zu beschleunigende
Masse (Totalgewicht des Rennfahrzeuges) die Beschleunigung beeinflusst
(Sie kennen das sicherlich vom Fahrradfahren). Für ein Nutzfahrzeugmodell
steht jedoch nicht geringes Gewicht und maximale Antriebsleistung
innerhalb kurzem Zeitraum, sondern möglichst geringe Verluste
und lange Fahrzeiten im Vordergrund. Das Gewicht des Antriebsmotors
ist als zweitrangig einzustufen.
Diese Aussagen haben für das sogenannte stationäre
Verhalten des Gleichstrommotors Gültigkeit, welches durch
eine stationäre Kennlinie dargestellt wird. Da unser Gleichstrommotor
jedoch immer wieder in seiner Drehzahl und Belastung verändert
wird, ist das sog. dynamische Verhalten für uns ebenfalls
von grosser Wichtigkeit, da von praktischer Bedeutung.
Die für uns wichtigen Punkte sind die sog.
Drehzahl-Drehmomenten- Kennlinien (Drehzahl in Abhängigkeit
des Drehmomentes) und die sog. Ankerstrom-Drehmomenten-Kennlinien
(Drehmoment in Abhängigkeit von Ankerstrom). Wir wollen wissen,
wie sich unser zukünftiger Gleichstrommotor in unterschiedlichen
Fahrsituationen verhält; sich also Drehmoment und Stromverbrauch
bei unterschiedlichen Belastungszuständen verhalten.
Im nachfolgenden Beispiel (Bild 7) ist ein
dynamisches Verhalten grafisch dargestellt. |
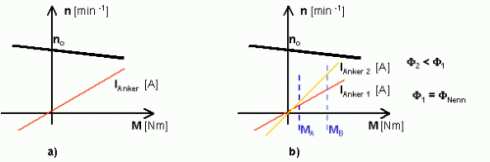 |
| Bild 7: (Quelle:
Author) |
| Hat das angelegte Drehmmoment [M]
den Wert Null (da wo sich die beiden Achsen schneiden), nennt man
diese Drehzahl 'Leerlaufdrehzahl' [no]. Diese Angabe findet
man oft auf Verpackungen oder Hochglanzprospekten. Leider sagt uns
diese herzlich wenig, da unser Motor immer mit einem Drehmoment
belastet ist - und sei es "nur" durch angeflanschte Getriebe, die
bekanntlich mechanische Verluste haben, also dem Motor einen mechanischen
Widerstand entgegensetzen (sog. 'angelegtes Moment'). Folgt man
der Drehzahlkennlinie nach rechts, nimmt das angelegte Drehmoment
zu und der sog. Drehzahlabfall des Motors tritt ein. (= Verringerung
der Drehzahl). Bild 7 a) zeigt den
Drehzahlverlauf in Abhängigkeit des angelegten Drehmomentes [M]
sowie die Zunahme des aufgenommenen Ankerstromes [I_Anker]. Wir
sehen in diesem Beispiel, dass auch bei steigender Belastung,
der Drehzahlabfall relativ gering ist. Der Fachmann würde sagen,
die Charakteristik eines solchen Motors ist "hart". Des weiteren
ist auf Bild 7 a) die Stromaufnahme ersichtlich. Sie ist Null
bei Drehmoment Null und steigt mit zunehmenden Drehmoment relativ
steil an.
Bild 7 b) zeigt dasselbe wie Bild 7 a), jedoch
sind zwei Stromverläufe gezeichnet: I_Anker_1 und I_Anker_2.
I_Anker_2 it ein Beispiel für einen Gleichstrommotor mit geringerem
magnetischen Fluss. Der magnetische Fluss ist vom verwendeten
Magnetwerkstoff abhängig. Teure (= da selten oder komplex in der
Herstellung) Magnetwerkstoffe haben eine grosse Flussdichte und
weisen in unserem Beispiel (I_Anker_1) eine geringere Steigung
des Stromverlaufes auf. Billige(re) Magnetwerksoffe hingegen besitzen
einen geringere Flussdichte auf und dadurch eine grosse Steigung
im Stromverlauf (I_Anker_2). Was das in der Praxis bedeutet, sagt
uns Bild 7b): Liegt bei "Billigmotoren" ein grosses Drehmoment
am Motor an, so nimmt die Stromaufnahme stark zu, im Gegensatz
zu Motoren mit hochwertigen Magnetwerkstoffen, wo die Stromaufnahme
weniger stark ansteigt. Ein Modell, welches also ständig mit hohen
Drehmomenten am Motorabtrieb (!) konfrontiert wird, nimmt in Abhängigkeit
des verwendeten Magnetwerkstoff unterschiedlich hohe Ströme auf.
Wir können also folgende Schlussfolgerungen daraus ziehen:
Das angelegte Drehmoment sollte möglichst
klein sein, um mit möglichst geringen Strömen unser Modell zu
bewegen. Es ist damit nicht gesagt, dass der Einsatz eines
(oft teuren) Gleichstromotors mit höherwertigem Magnetwerkstoff
das Mass aller Dinge ist und niedrige Stromaufnahme garantiert.
Genügt nämlich bereits ein niedriges Drehmoment
(Bsp. M_A) um unser Modell fortzubewegen (Bsp. unter Verwendung
eines hochwertigen, sinnvoll abgestuften Getriebe), so kann auch
mit einem Gleichstrommotor "von der Stange" ein akzeptabler Stromverbrauch
erreicht werden, da wir uns beim Betrieb des Modells nahe der
Nenndrehzahl [no] bewegen. (Vergleichen Sie hierzu die Schnittpunkte
von I_Anker_1 und I_Anker_2 mit den beiden Momenten M_A und M_B:
Sie stellen fest, dass bei M_A die Differenz zwischen I_Anker_1
und I_Anker_2 relativ gering ist. In diesem Fall würde sich die
Anschaffung eines teureren Elektromotors mit höherwertigen Magnetwerkstoffen
kaum lohnen.) |
| |
|
7.) Die Drehzahlstellung (-steuerung)
|
Mit
Gleichstrommotoren kann man (abhängig von der Auslegung / Konstruktion)
problemlos beliebige Drehzahlen einstellen / erreichen. Über folgende
Grössen kann die Drehzahl verändert werden:
- Ankerspannung U_A (sog. Spannungssteuerung)
- Hauptfeldfluss 'Phi' (sog. Feldsteuerung)
also quasi die "Stärke" des Magnetfeldes
- Ankerwiderstand R_Anker (sog. Widerstandssteuerung)
Spannungssteuerung
Die Ankerspannung [U] ist hingegen für uns
eine regelbare Grösse, mit welcher die Drehzahl geregelt werden
kann. In Bild 8 als parallel gegeneinander verschobene Geraden
dargestellt. Wichtig anzumerken ist, dass der (Anker)Strom
unabhängig von der angelegten Spannung ist. Der Motor bezieht
durch seine Wirkungsweise quasi automatisch die notwendige Stromstärke
der Energiequelle. Dies im Gegensatz zu einer Verbrennungsmaschine,
welche "von aussen gefüttert" werden muss (Bsp. Gaspedal).
Feldsteuerung
Bei dieser Methode wird der magnetische Hauptfeldfluss
['Phi'] verändert. Logischerweise ist dies nur dann möglich, wenn
das Hauptfeld mittels Erregerwicklungen, also nicht mittels Permanentmagneten,
erzeugt wird. Bei Modellmotoren ist der magnetische Hauptfluss
konstruktionsbedingt gegeben (Dauermagnete mit konstantem magnetischen
Fluss) und kann (vom Käufer) nicht verändert werden. Trotzdem
sei an dieser Stelle nochmals auf Bild 7 b) hingewiesen, in welchem
die Stromaufnahme in Abhängigkeit vom magnetischen Hauptfluss
dargestellt ist. Je höher der magnetische Fluss, desto geringer
die Stromaufnahme bei konstantem Moment.
Widerstandssteuerung
Die Widerstandssteuerung trifft man oft bei
Modellbausätzen an. Dabei liegt dem Bausatz ein, mittels Servo
bedienbarer, verstellbarer Widerstand bei. Dieser ist in Serie
mit dem Elektromotor geschaltet und bei Stromfluss fällt über
diesem eine Spannung nach dem ohmschen Gesetz U = R * I ab und
über dem Motor liegt eine um diesen Betrag niedrigere Spannung
an. Dabei wird die "unbenötigte" Energie in Form von Wärme "vernichtet"
(Prinzip Elektroheizung). Wir erinnern uns an dieser Stelle, dass
ein Gleichstromotor immer "selbständig" diejenige Stromstärke
bezieht, die für die Überwindung des angelegten Drehmomentes notwendig
ist. Die Spannungverringerung über dem Motor führt also nur zu
einer Verringerung der Drehzahl, nicht aber zu einem geringeren
Stromverbrauch. (Also spielt es bei einer solcher Art der Drehzahlsteuerung
eigentlich keine Rolle, ob Sie immer Vollgas oder nur Dreiviertelgas
fahren.)
|
|
|